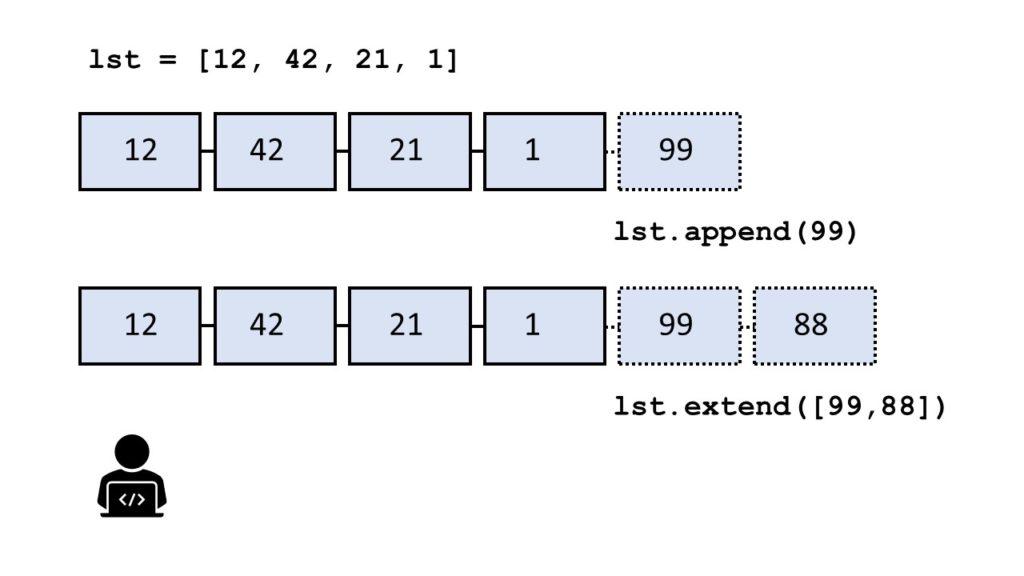
Extend lines by increment (iterative) stop when collision True
Por um escritor misterioso
Descrição
Hi, I am trying to achieve a Gilbert Tessellation as an exercise. The idea is simple, lines from random points extend both sides in random directions, until they intersect. So, the intention is to create a loop that extends each line by a factor, and constantly checks for intersections. The catch is that there is a loop for each line… when the intersection is true for one line, that line stops extending while the others continue. I am stuck… how can this simple algorithm be achieved? This is
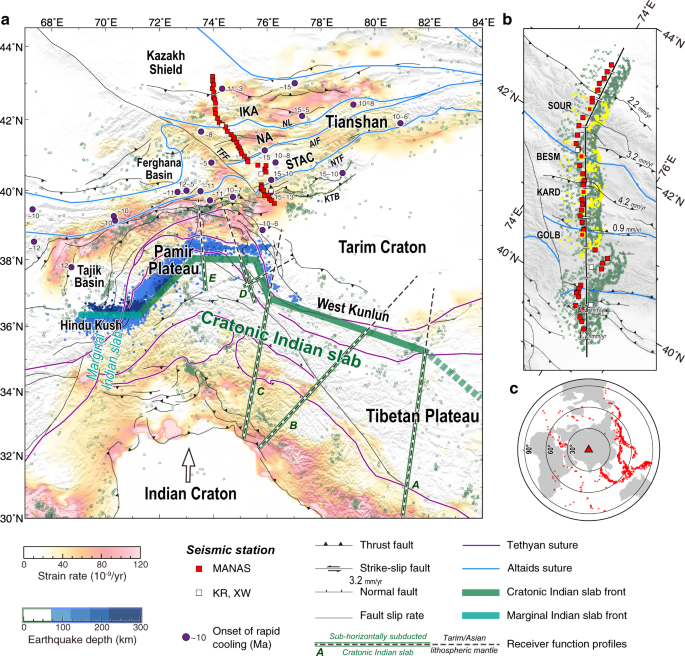
Intracontinental deformation of the Tianshan Orogen in response to India-Asia collision

Full article: Learning-based collision-free planning on arbitrary optimization criteria in the latent space through cGANs

Intelligent Computing: The Latest Advances, Challenges, and Future

Accurate and Efficient Spin–Phonon Coupling and Spin Dynamics Calculations for Molecular Solids
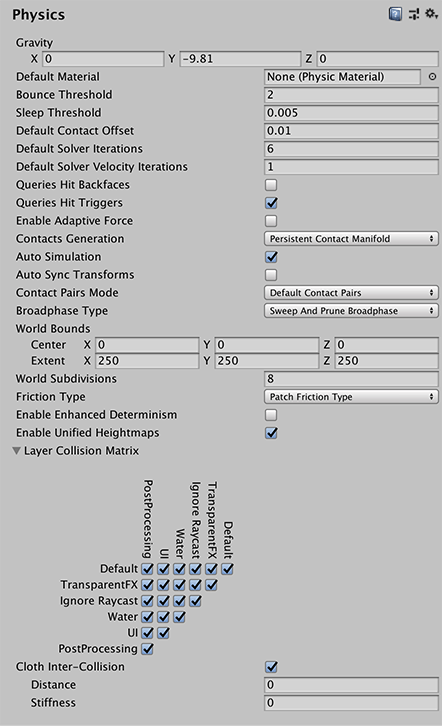
Physics - Unity Manual
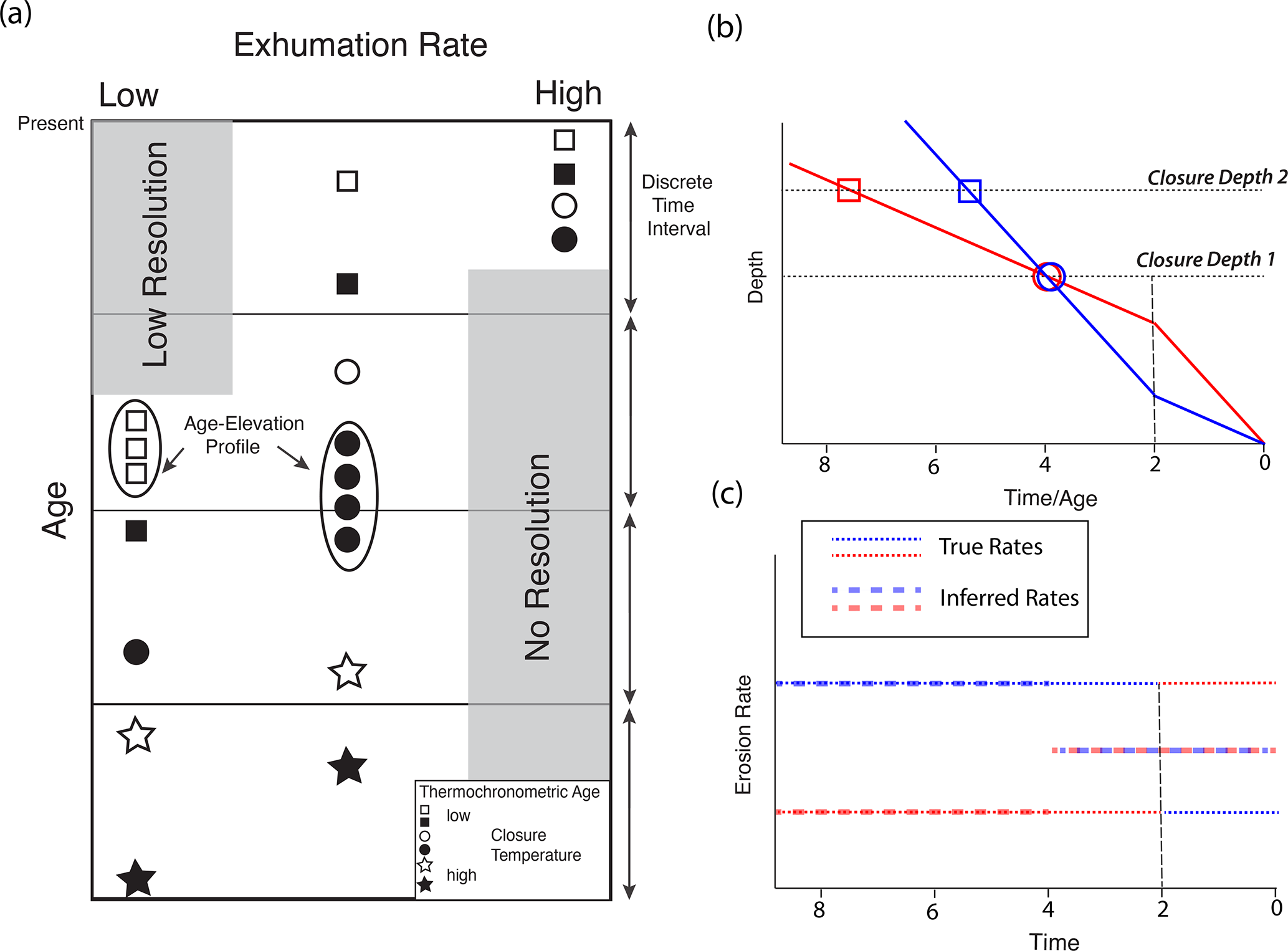
ESurf - Bias and error in modelling thermochronometric data: resolving a potential increase in Plio-Pleistocene erosion rate
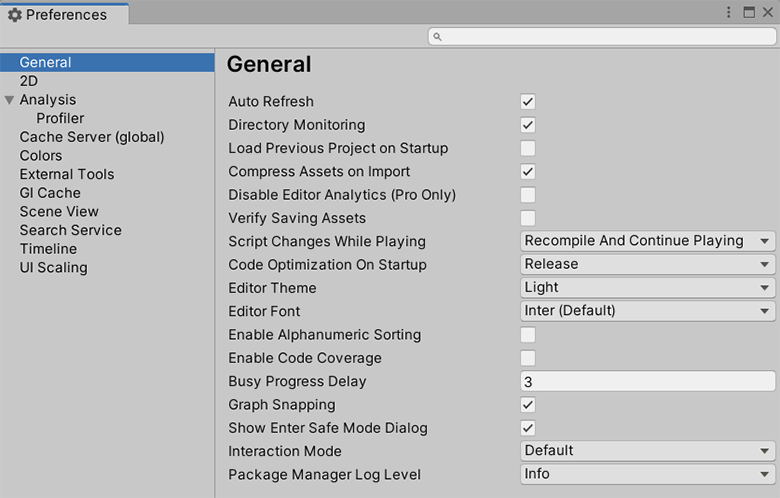
Preferences - Unity Manual
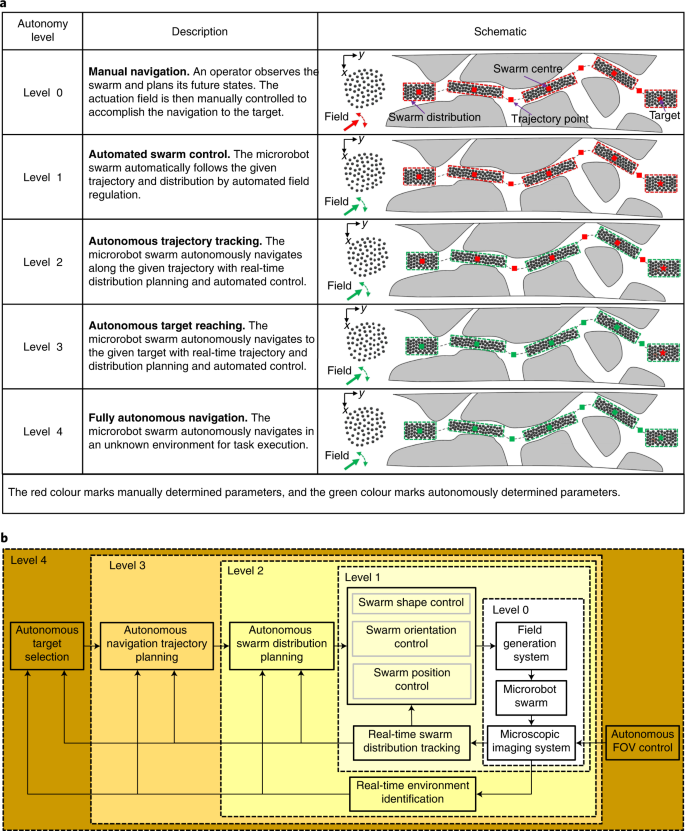
Autonomous environment-adaptive microrobot swarm navigation enabled by deep learning-based real-time distribution planning
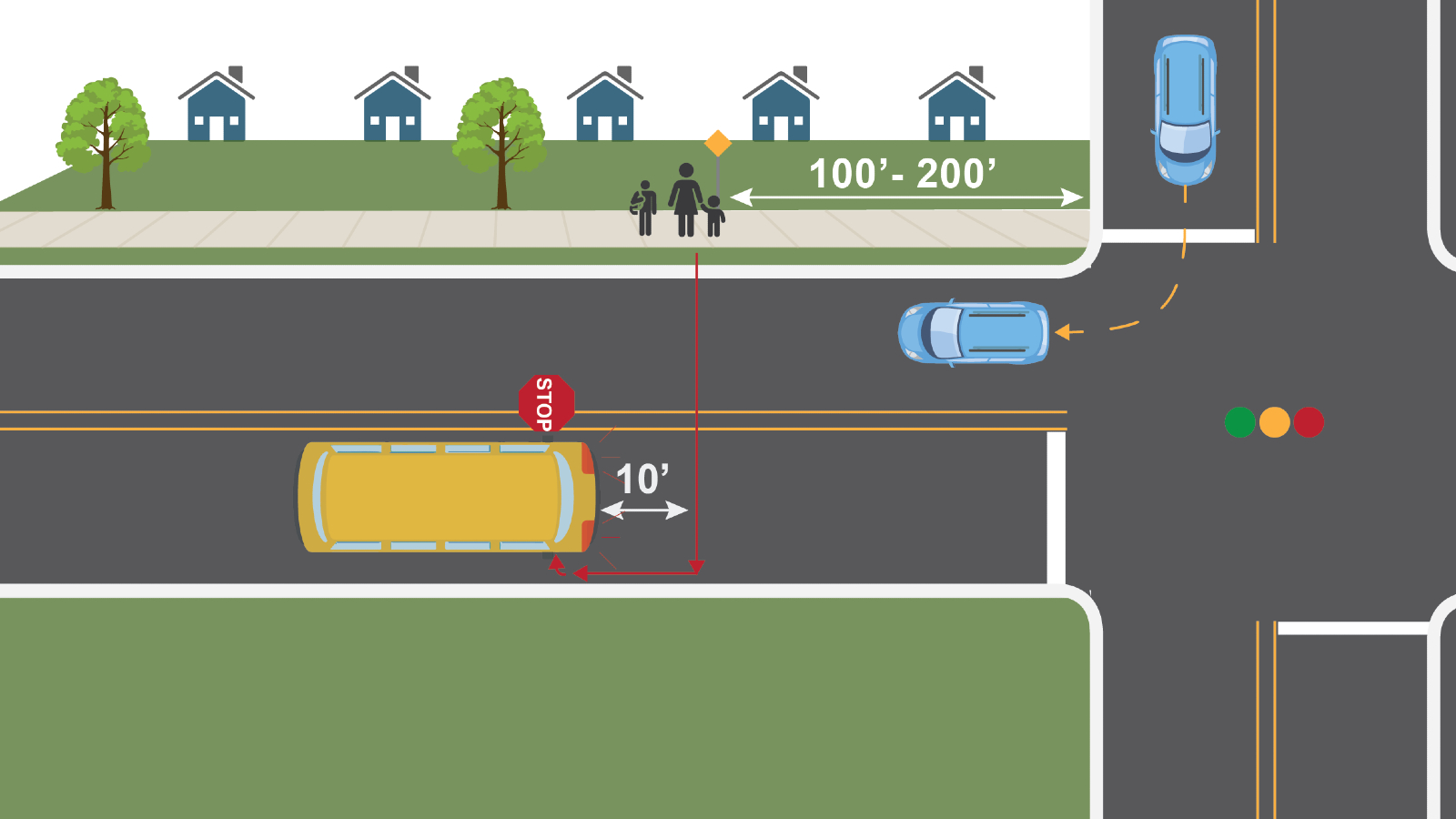
Planning for Safety
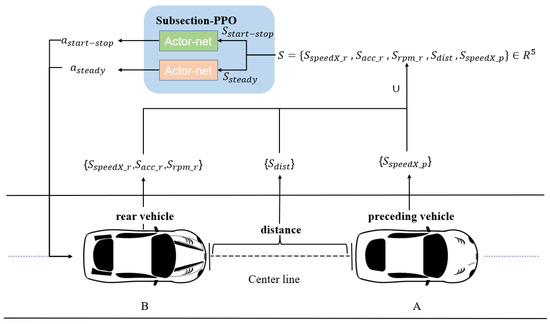
Applied Sciences, Free Full-Text

Lane Ends, Merge Left: Redesigning the W4-2 Road Sign to End Confusion - 99% Invisible

Full article: A constraint-based approach for human–robot collision avoidance
Flow Chart of ACO Algorithm 1-Initialization: Two parts are involved in
de
por adulto (o preço varia de acordo com o tamanho do grupo)