Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Descrição

PDF) Parallel Robot - Review Article
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)

The inverse kinematics of a 7R 6-degree-of-freedom robot with non-spherical wrist - Xuhao Wang, Dawei Zhang, Chen Zhao, 2017

Design and kinematic analysis of a 3-RRR spherical parallel manipulator reconfigured with four–bar linkages - ScienceDirect
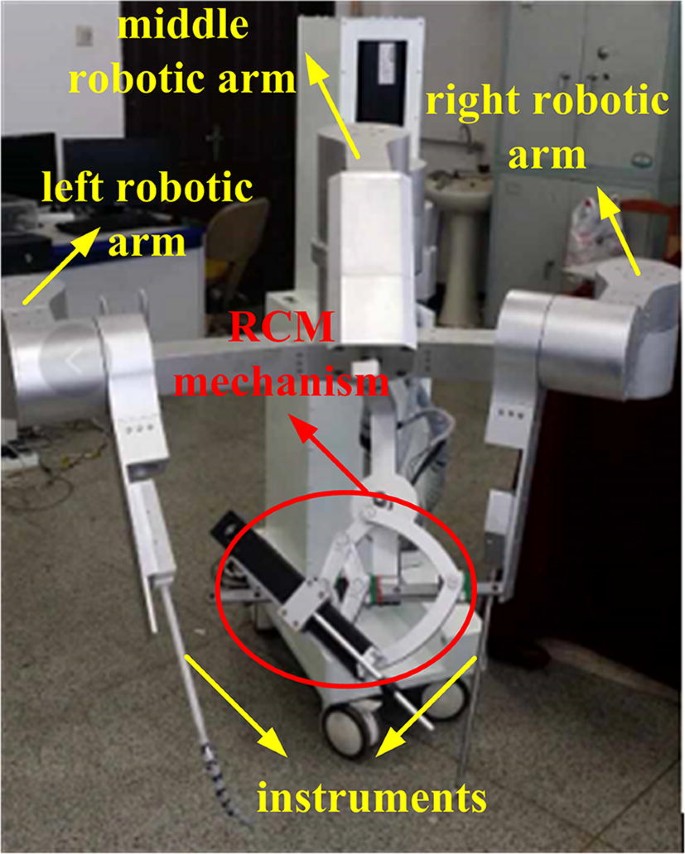
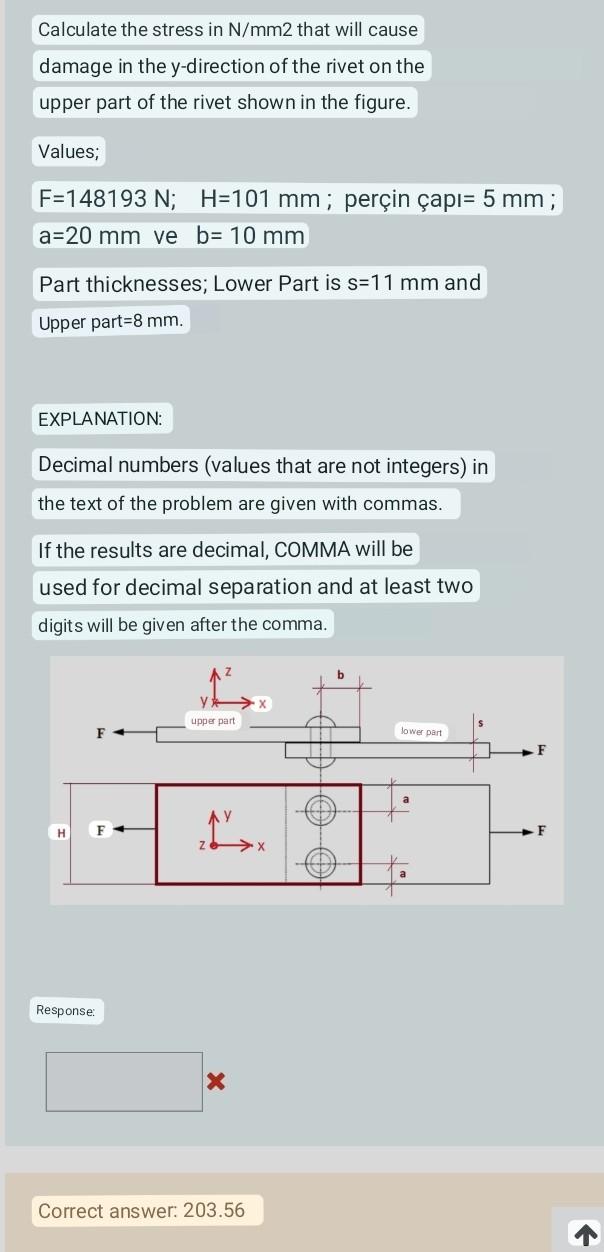
New remote centre of motion mechanism for robot-assisted minimally invasive surgery, BioMedical Engineering OnLine

CIMAR
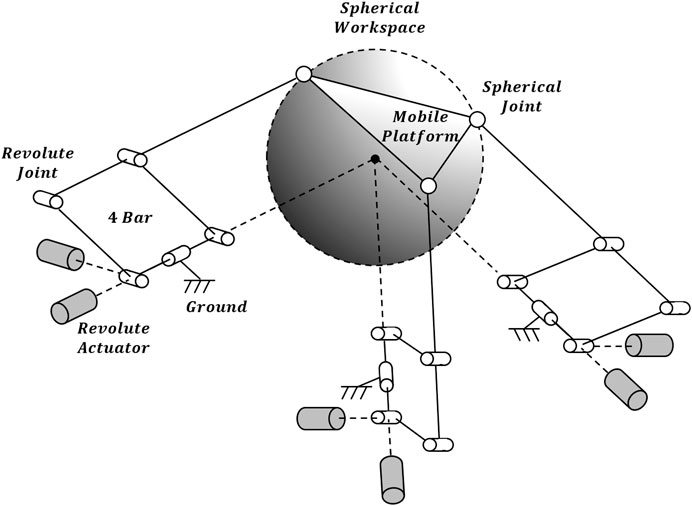
Frontiers Optimizing the Rigid or Compliant Behavior of a Novel Parallel-Actuated Architecture for Exoskeleton Robot Applications
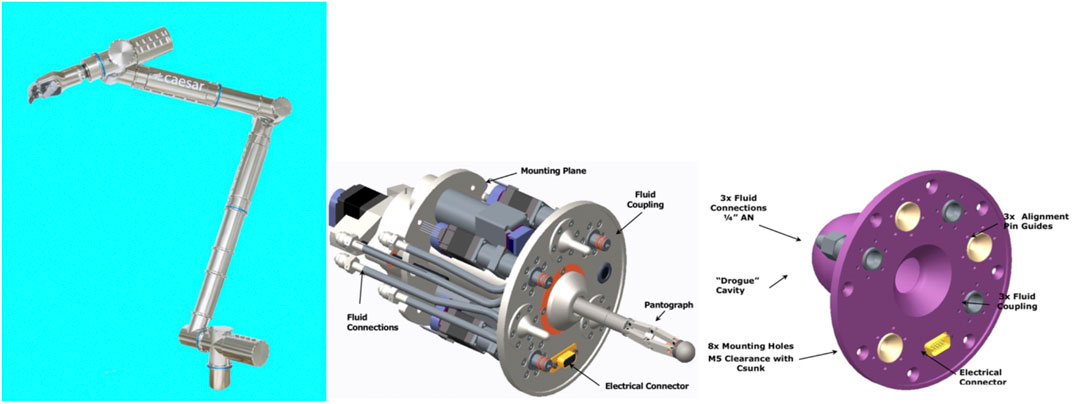
Frontiers Robotic Manipulation and Capture in Space: A Survey

Kinematics analysis of a 3-DOF joint for a novel hyper-redundant robot arm

Proposal of paper format for IFToMM World Congress
de
por adulto (o preço varia de acordo com o tamanho do grupo)